Edge detection in image analysis
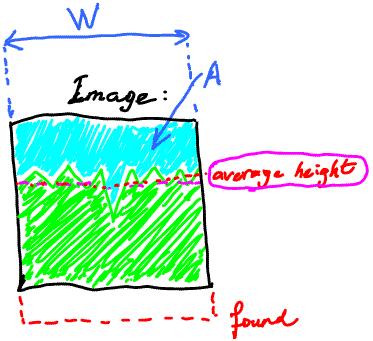
One of the most basic methods of analyzing gray scale image is to find the pixels area of high contrast. These areas are likely to be where an object ends and the the background begins.
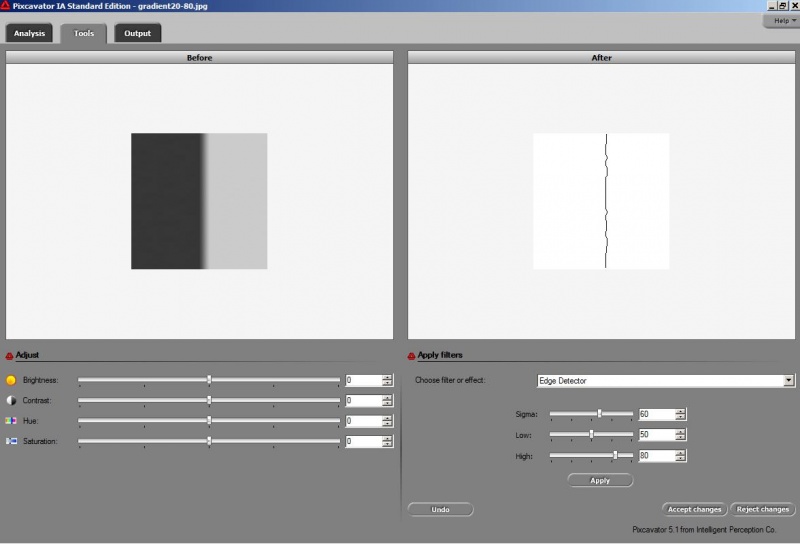
More precisely, these are the areas where the change of the gray - for light to dark or dark to light - is the fastest. Then one needs a threshold so that all pixels where this change is higher that this number are considered “edges”:
Mathematically, we deal with
the rate of change of the gray level
= the gradient of the gray scale function.
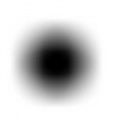
(In fact, one only needs the norm of the gradient.) Computation of the derivative however in the digital (discrete) context is a challenge as it is severely affected by noise. Consider the image of coins and its version with noise added.

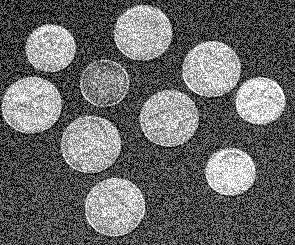
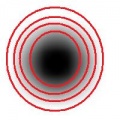
If now edge detection is run, the results are unsatisfactory - too many irrelevant contours.
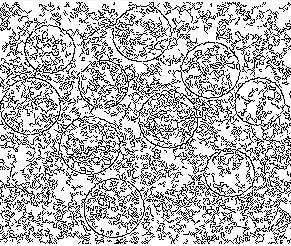
Of course it may be possible to filter out the smaller contours. In this particular case it’s impossible because they are parts of large ones. In fact they form large fractal-like structures. This is the reason why edge detection may have to be preceded by smoothing of the image.
Digital discoveries
- Casinos Not On Gamstop
- Non Gamstop Casinos
- Casino Not On Gamstop
- Casino Not On Gamstop
- Non Gamstop Casinos UK
- Casino Sites Not On Gamstop
- Siti Non Aams
- Casino Online Non Aams
- Non Gamstop Casinos UK
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- UK Casinos Not On Gamstop
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- Non Gamstop Casinos
- Non Gamstop Casino Sites UK
- Best Non Gamstop Casinos
- Casino Sites Not On Gamstop
- Casino En Ligne Fiable
- UK Online Casinos Not On Gamstop
- Online Betting Sites UK
- Meilleur Site Casino En Ligne
- Migliori Casino Non Aams
- Best Non Gamstop Casino
- Crypto Casinos
- Casino En Ligne Belgique Liste
- Meilleur Site Casino En Ligne Belgique
- Bookmaker Non Aams
- カジノ ライブ
- онлайн казино с хорошей отдачей
- スマホ カジノ 稼ぐ
- ブック メーカー オッズ
- Top 3 Nhà Cái Uy Tín Nhất
- Trang Web Cá độ Bóng đá Của Việt Nam
- Casino En Ligne Avis
- Casino En Ligne France
- Casino En Ligne
- 꽁머니 토토
- Casino Online Non Aams
- Migliori Casino Non AAMS
- Meilleur Casino En Ligne
- Casino En Ligne France Légal
- Casino En Ligne France Légal
- Casinos En Ligne
- Mejores Casinos Online