A dozen new image analysis examples
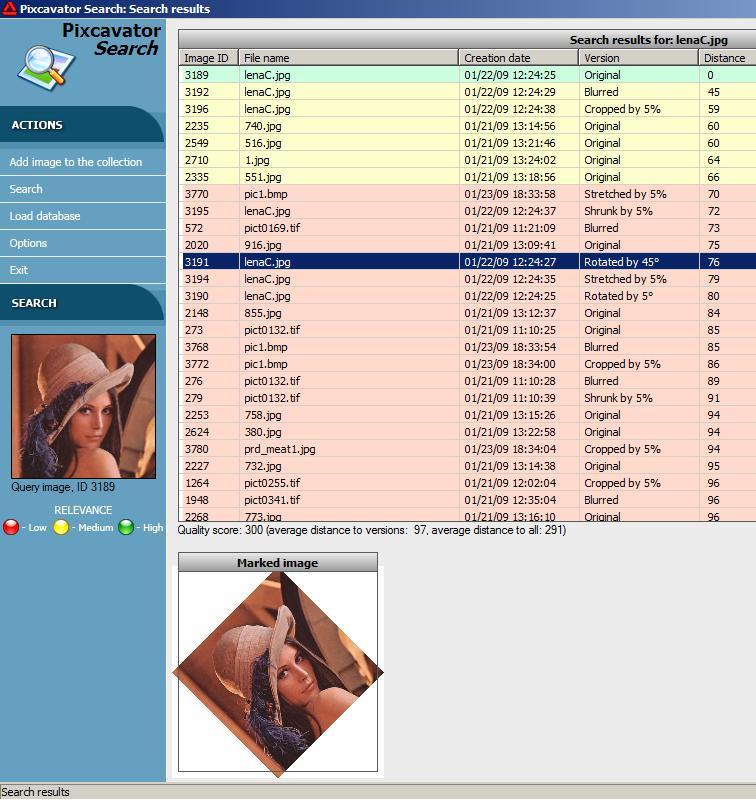
Over the last few months I have been contacted by many individuals and companies asking for help with their image analysis task or to evaluate the suitability of Pixcavator for them. I decided to pull some of these exchanges for my correspondence and present them to the public in the wiki under Image analyisis examples. The anonymity of the users is of course protected. There will be more examples.
From other news, I started to use Twitter (ID PeterSaveliev) to announce new posts for this blog as well as some short notes on the same subject. We’ll see how it goes… UPDATE: Boring!
I also decided to change, in part, how this blog is maintained vis-à-vis the wiki. In the past, a blog post would appear first. Then after a while, it would be turned into an article or articles in the wiki. Now I’ll start writing an article first and when it is sufficiently mature, I’ll post it in the blog. The news will appear as before.
Digital discoveries
- Casinos Not On Gamstop
- Non Gamstop Casinos
- Casino Not On Gamstop
- Casino Not On Gamstop
- Non Gamstop Casinos UK
- Casino Sites Not On Gamstop
- Siti Non Aams
- Casino Online Non Aams
- Non Gamstop Casinos UK
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- UK Casinos Not On Gamstop
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- Non Gamstop Casinos
- Non Gamstop Casino Sites UK
- Best Non Gamstop Casinos
- Casino Sites Not On Gamstop
- Casino En Ligne Fiable
- UK Online Casinos Not On Gamstop
- Online Betting Sites UK
- Meilleur Site Casino En Ligne
- Migliori Casino Non Aams
- Best Non Gamstop Casino
- Crypto Casinos
- Casino En Ligne Belgique Liste
- Meilleur Site Casino En Ligne Belgique
- Bookmaker Non Aams
- カジノ ライブ
- онлайн казино с хорошей отдачей
- スマホ カジノ 稼ぐ
- ブック メーカー オッズ
- Top 3 Nhà Cái Uy Tín Nhất
- Trang Web Cá độ Bóng đá Của Việt Nam
- Casino En Ligne Avis
- Casino En Ligne France
- Casino En Ligne
- 꽁머니 토토
- Casino Online Non Aams
- Migliori Casino Non AAMS
- Meilleur Casino En Ligne
- Casino En Ligne France Légal
- Casino En Ligne France Légal
- Casinos En Ligne
- Mejores Casinos Online