






Radiologists overlook 1/3 of cancer cases
The title may sound sensationalist but it came from this study outlined at ScienceDaily.com. Here is the full quote:
When people are asked to search for an item that will appear only once in 100 images, they might miss as many as a third of the objects they’re supposed to be finding. Studies of radiologists looking at images to find cancer have shown similar error rates.
I think this fact provides new evidence in support of the use of computer aided diagnosis (CAD). It is happening but the progress is very slow. Screening seems the most appropriate starting point. It could be cancer or blood work (see the article on cell counting in our wiki).
Digital discoveries
- Casinos Not On Gamstop
- Non Gamstop Casinos
- Casino Not On Gamstop
- Casino Not On Gamstop
- Non Gamstop Casinos UK
- Casino Sites Not On Gamstop
- Siti Non Aams
- Casino Online Non Aams
- Non Gamstop Casinos UK
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- UK Casinos Not On Gamstop
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- Non Gamstop Casinos
- Non Gamstop Casino Sites UK
- Best Non Gamstop Casinos
- Casino Sites Not On Gamstop
- Casino En Ligne Fiable
- UK Online Casinos Not On Gamstop
- Online Betting Sites UK
- Meilleur Site Casino En Ligne
- Migliori Casino Non Aams
- Best Non Gamstop Casino
- Crypto Casinos
- Casino En Ligne Belgique Liste
- Meilleur Site Casino En Ligne Belgique
- Bookmaker Non Aams
- カジノ ライブ
- онлайн казино с хорошей отдачей
- スマホ カジノ 稼ぐ
- ブック メーカー オッズ
- Top 3 Nhà Cái Uy Tín Nhất
- Trang Web Cá độ Bóng đá Của Việt Nam
- Casino En Ligne Avis
- Casino En Ligne France
- Casino En Ligne
- 꽁머니 토토
- Casino Online Non Aams
- Migliori Casino Non AAMS
- Meilleur Casino En Ligne
- Casino En Ligne France Légal
- Casino En Ligne France Légal
- Casinos En Ligne

 Caught a CSI show and started to reminisce. Tons of cool equipment including computers of all kinds and software from the 22nd century. Fingerprint identification? In seconds! DNA analysis? A snap! Even face recognition (ha!). At the same time you see them staring at those old fashioned light microscopes. The CSI people do their investigations in Second Life now but never use digital microsopes. Fiction?
Caught a CSI show and started to reminisce. Tons of cool equipment including computers of all kinds and software from the 22nd century. Fingerprint identification? In seconds! DNA analysis? A snap! Even face recognition (ha!). At the same time you see them staring at those old fashioned light microscopes. The CSI people do their investigations in Second Life now but never use digital microsopes. Fiction?
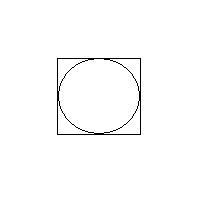 Recall that in the
Recall that in the  the right. Suppose we have detected and captured these objects and now all we want to do is to tell nuts from bolts. Let’s adopt a “dumb” approach and try to use the simplest method available. Then some of these objects can be classified based on size only. However, there are some bolts and nuts of about the same size and we have to look at their shapes. That does not work out as you’d expect.
the right. Suppose we have detected and captured these objects and now all we want to do is to tell nuts from bolts. Let’s adopt a “dumb” approach and try to use the simplest method available. Then some of these objects can be classified based on size only. However, there are some bolts and nuts of about the same size and we have to look at their shapes. That does not work out as you’d expect.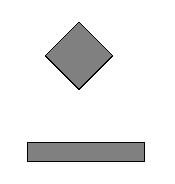 s (digital) perimeter is 4*√2*a. Now, a horizontally oriented rectangle (√2+1)*a by (√2-1)*a will have the same measurements. The proportions of this rectangle are about 1-to-5. It’s a bolt that looks like a nut…
s (digital) perimeter is 4*√2*a. Now, a horizontally oriented rectangle (√2+1)*a by (√2-1)*a will have the same measurements. The proportions of this rectangle are about 1-to-5. It’s a bolt that looks like a nut…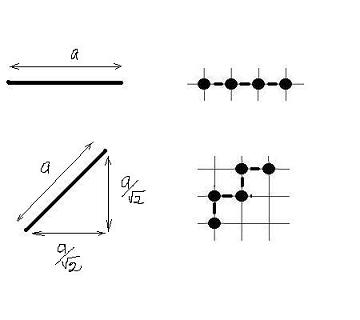 Consider this example. If r is the size of the pixel, a line segment of length a will be represented by roughly a/r pixels… but only if it is placed horizontally or vertically! If it is placed diagonally, there will be √2*a/r pixels arranged in the staircase pattern. The result is that the digital length of a curve may vary by 40%. If you overlook this difference, the consequences may be disastrous.
Consider this example. If r is the size of the pixel, a line segment of length a will be represented by roughly a/r pixels… but only if it is placed horizontally or vertically! If it is placed diagonally, there will be √2*a/r pixels arranged in the staircase pattern. The result is that the digital length of a curve may vary by 40%. If you overlook this difference, the consequences may be disastrous.


")


