This site contains: mathematics courses and book; covers: image analysis, data analysis, and discrete modelling; provides: image analysis software. Created and run by Peter Saveliev.
Noise
From Intelligent Perception
How does one calculate the amount of noise in a photo?
This is an unusual question. Typically, users want to extract information from the image. Then Pixcavator gives them the objects largest in size or highest in contrast or both (see Objects in gray scale images).
The answer certainly depends on your definition of the word "noise". Noise can be measured in a number of ways. Is it the total variation of the color? Specifically, the standard deviation of the gray scale function. If this makes sense to you, ImageJ might help.
This approach however ignores the fact that one has to analyze the image before something is declared noise.
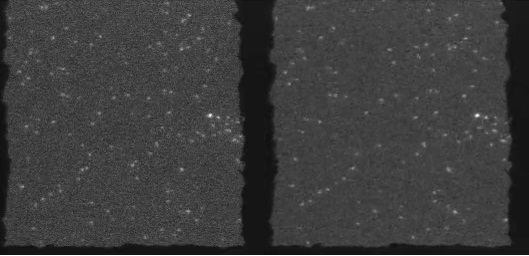
From my point of view, a better approach to noise is to decide first what's not noise, then look at what's left.
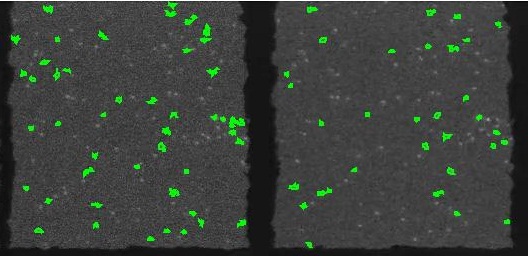
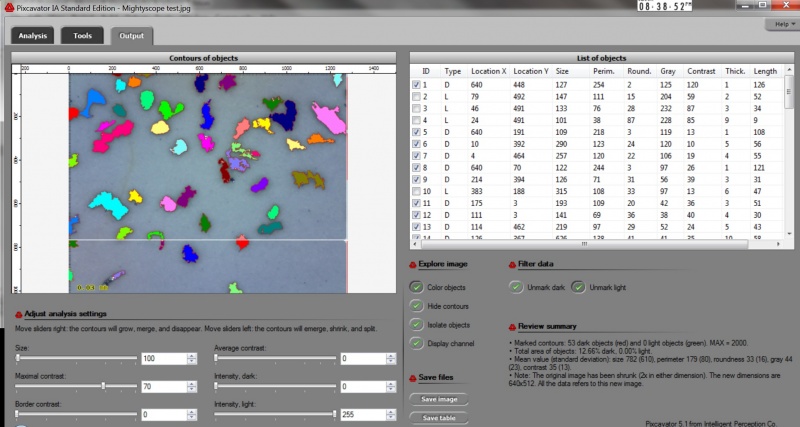
For example, one can measure noise as the number of objects ignored by analysis. Pixcavator might be able to help here. Two steps:
Step 1: Find settings that produce meaningful results and capture the important objects in the image. Step 2: Compare that to the number of objects under very low setting of the sliders.
A simpler way to measure the amount of noise may be to subtract the area of non-noise from the total area of the image. The former is the "total area of objects" in the review summary of Pixcavator. It's simply the total area of all (marked) objects listed in Pixcavator's output table. The areas for dark and light objects are measured separately and they are given as percentages of the total area of the image.
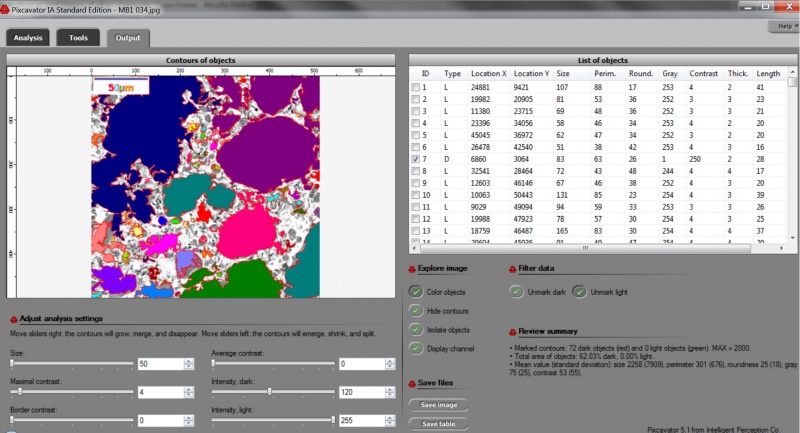
A drawback of this is that flat areas (no noise!) will also be included:
A possible alternative may be to compute the total area of the objects at a low setting...
A more general approach to both image and data analysis is via persistent homology and the noise group.
According to Discrete Calculus: Applied Analysis on Graphs for Computational Science by Grady and Polimeni, p. 155. "... we may generally assume that the noise has high spacial frequency." So, it's the part of the data that changes a lot from a vertex to the next. "Therefore, the goal of the most filtering operations is to remove the high frequency noise, while being careful to preserve the high [low?] frequency signal (often modeled as spacial discontinuities)." The latter is an abrupt but one time change in the value.
Digital discoveries
- Casinos Not On Gamstop
- Non Gamstop Casinos
- Casino Not On Gamstop
- Casino Not On Gamstop
- Non Gamstop Casinos UK
- Casino Sites Not On Gamstop
- Siti Non Aams
- Casino Online Non Aams
- Non Gamstop Casinos UK
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- UK Casinos Not On Gamstop
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- Non Gamstop Casinos
- Non Gamstop Casino Sites UK
- Best Non Gamstop Casinos
- Casino Sites Not On Gamstop
- Casino En Ligne Fiable
- UK Online Casinos Not On Gamstop
- Online Betting Sites UK
- Meilleur Site Casino En Ligne
- Migliori Casino Non Aams
- Best Non Gamstop Casino
- Crypto Casinos
- Casino En Ligne Belgique Liste
- Meilleur Site Casino En Ligne Belgique
- Bookmaker Non Aams
- カジノ ライブ
- онлайн казино с хорошей отдачей
- スマホ カジノ 稼ぐ
- ブック メーカー オッズ
- Top 3 Nhà Cái Uy Tín Nhất
- Trang Web Cá độ Bóng đá Của Việt Nam
- Casino En Ligne Avis
- Casino En Ligne France
- Casino En Ligne
- 꽁머니 토토
- Casino Online Non Aams
- Migliori Casino Non AAMS
- Meilleur Casino En Ligne
- Casino En Ligne France Légal
- Casino En Ligne France Légal
- Casinos En Ligne
- Mejores Casinos Online
