This site is devoted to mathematics and its applications. Created and run by Peter Saveliev.
Images as functions of two variables
From Intelligent Perception
1 Binary images


Binary image is a table of 0s and 1's. We treat each pixel as a square. The union of these squares gives us the domain of the function. This function has only two possible values.
2 Gray scale images
Grayscale Images are defined as follows. The level of gray of each pixel is given by a number between 0 and 255. Thus, there are the total of 256 = 28 levels of gray. These numbers together form the gray scale function of the image. An example is on the right.
Another example with larger (162x205) image is below.

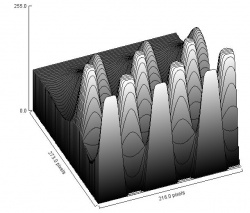
The image on the left is accompanied by its gray scale function. Lighter means higher values and darker means lower values.
See also Functions of several variables and Gray scale function.
3 Color images
Each pixel is associated with 3 numbers, so this is a vector function.
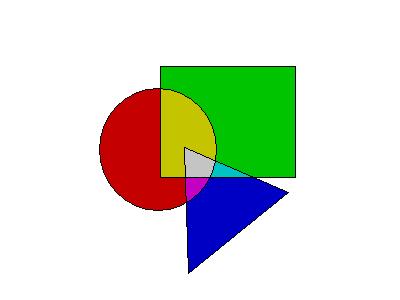
The color effect is achieved by combining different levels of red, green, and blue (RGB). Each color runs from 0 to 255. Thus, in an RGB image to every pixel there assigned 3 integers. One can think of a color image as a 3-vector attached to each pixel or as 3 tables of integers, etc. Our approach will be different. By means of a procedure similar to thresholding described above we represent color images as arrays of binary images. The color space is a 255×255×255 array with each entry corresponding to a particular color. As a result, thresholding a color image will produce a 255×255×255 array of binary images.
There also may be "multi-channel" images or images with other attributes assigned to each pixel...
4 Applications
Problem: Suppose we have a binary image. How do we compute the area of the region R of 1's (pixels are treated as squares)?
One can simply run through the image row by row and count 1's. However, this calculation is "expensive", given that
time ~ N, number of pixels, and not time (not) ~ n, number of pixels in the region R.
Further, it is possible that N >> n. On the other hand, following the boundary in the calculation is rather inexpensive as time ~ √n. To apply Stokes theorem, we treat the image as a function of two variables. This function is constant on each pixel, so it's integrable. Then
∫∫R 1 dA = ʃ∂R x dx,
and the integrals turn into sums:
∑i ∑j 1 = ∑x xk for horizontal segments. where xk is the x-coordinate of k-th point.
The result is a simple algorithm (utilized in Pixcavator image analysis software).
Digital discoveries
- Casinos Not On Gamstop
- Non Gamstop Casinos
- Casino Not On Gamstop
- Casino Not On Gamstop
- Non Gamstop Casinos UK
- Casino Sites Not On Gamstop
- Siti Non Aams
- Casino Online Non Aams
- Non Gamstop Casinos UK
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- UK Casinos Not On Gamstop
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- Non Gamstop Casinos
- Non Gamstop Casino Sites UK
- Best Non Gamstop Casinos
- Casino Sites Not On Gamstop
- Casino En Ligne Fiable
- UK Online Casinos Not On Gamstop
- Online Betting Sites UK
- Meilleur Site Casino En Ligne
- Migliori Casino Non Aams
- Best Non Gamstop Casino
- Crypto Casinos
- Casino En Ligne Belgique Liste
- Meilleur Site Casino En Ligne Belgique
- Bookmaker Non Aams
- カジノ ライブ
- онлайн казино с хорошей отдачей
- スマホ カジノ 稼ぐ
- ブック メーカー オッズ
- Top 3 Nhà Cái Uy Tín Nhất
- Trang Web Cá độ Bóng đá Của Việt Nam
- Casino En Ligne Avis
- Casino En Ligne France
- Casino En Ligne
- 꽁머니 토토
- Casino Online Non Aams
- Migliori Casino Non AAMS
- Meilleur Casino En Ligne
- Casino En Ligne France Légal
- Casino En Ligne France Légal
- Casinos En Ligne
- Mejores Casinos Online