This page is a part of CVprimer.com, a wiki devoted to computer vision. It focuses on low level computer vision, digital image analysis, and applications. It is designed as an online textbook but the exposition is informal. It geared towards software developers, especially beginners, and CS students. The wiki contains mathematics, algorithms, code examples, source code, compiled software, and some discussion. If you have any questions or suggestions, please contact me directly.
Boundary
From Computer Vision Primer
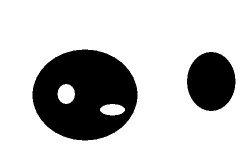
Suppose we are given an object in a digital image (see Objects in binary images and Objects in gray scale images). The idea of boundary is quite simple. It is what separates the object from the rest of the image (the complement). It is what "bounds" the object, the contour.
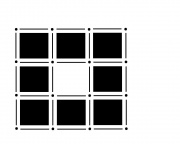
Some prefer to think of boundary as a collection of pixels. We instead rely on cell decomposition of images. As a result the boundary is made of edges of pixels. When it is displayed by Pixcavator, it is, of course, a collection of pixels. (Download the free Pixcavator Student Edition here.)
The boundary of an object is the collection of all edges that are adjacent to both the object and its complement.
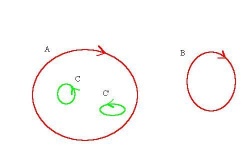
The edges of the boundary form a contour around the object. It is possible to represent it as a sequence of edges, or a cycle.
The perimeter of the object is the length of the boundary of the object.
Boundary = border.
In 3D objects are made of voxels, as a result their boundaries are made of the 3D faces of voxels. Boundaries are still "cycles" but they aren't sequences.
Digital discoveries
- Casinos Not On Gamstop
- Non Gamstop Casinos
- Casino Not On Gamstop
- Casino Not On Gamstop
- Non Gamstop Casinos UK
- Casino Sites Not On Gamstop
- Siti Non Aams
- Casino Online Non Aams
- Non Gamstop Casinos UK
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- UK Casinos Not On Gamstop
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- Non Gamstop Casinos
- Non Gamstop Casino Sites UK
- Best Non Gamstop Casinos
- Casino Sites Not On Gamstop
- Casino En Ligne Fiable
- UK Online Casinos Not On Gamstop
- Online Betting Sites UK
- Meilleur Site Casino En Ligne
- Migliori Casino Non Aams
- Best Non Gamstop Casino
- Crypto Casinos
- Casino En Ligne Belgique Liste
- Meilleur Site Casino En Ligne Belgique
- Bookmaker Non Aams
- カジノ ライブ
- онлайн казино с хорошей отдачей
- スマホ カジノ 稼ぐ
- ブック メーカー オッズ
- Top 3 Nhà Cái Uy Tín Nhất
- Trang Web Cá độ Bóng đá Của Việt Nam
- Casino En Ligne Avis
- Casino En Ligne France
- Casino En Ligne
- 꽁머니 토토
- Casino Online Non Aams
- Migliori Casino Non AAMS
- Meilleur Casino En Ligne
- Casino En Ligne France Légal
- Casino En Ligne France Légal
- Casinos En Ligne
- Mejores Casinos Online
