This page is a part of CVprimer.com, a wiki devoted to computer vision. It focuses on low level computer vision, digital image analysis, and applications. It is designed as an online textbook but the exposition is informal. It geared towards software developers, especially beginners, and CS students. The wiki contains mathematics, algorithms, code examples, source code, compiled software, and some discussion. If you have any questions or suggestions, please contact me directly.
Area
From Computer Vision Primer
Consider objects in binary or gray scale images. The the most important characteristic of an object is its area, which is simply the number of pixels. It's also the first measurement of importance of the object.
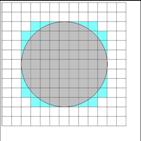
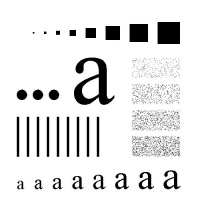
Whatever the "real" (or physical) object is, its area computed this way will be as close as we like to its "true" area as the resolution increases (not the case with Lengths of curves). This statement can be justified by appealing to Lebesgue integral [1]. See also the pictures below.
Keep in mind that the area includes the holes - in the sense that the area of the holes is not subtracted. This way a thin curve that encloses a region is as large (and as important) as the region itself. Note: one argument against this approach is that the area isn't stable under noise. For example, one extra pixel could complete a thin circle and dramatically increase the area of this object. My answer is that such an event is dramatic, just as dramatic as when two objects are united by a single extra pixel. For more see Robustness of topology.
Area or size of an object = the number of pixels in it
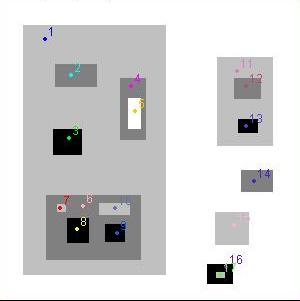
For example, object #11 has ...

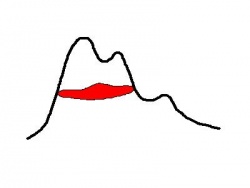
Suppose the survace on the left is the gray level function of the image. Then the tip cut with a horizontal plane corresponds to an object. Finally, the flat area marked in red is the size of the object.
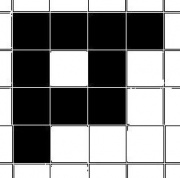
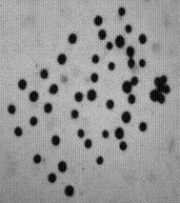
The images below show how the number of objects declines as the size threshold increases: 0, 100, 300, 500, 1000.
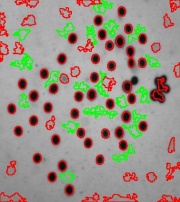
Below a segmentation is found with limitations on size only. A lot of noise is still counted as objects - at this or other settings for the size. Use size in conjunction with Contrast, Roundness and Saliency for better results.
Similarly, the Volume is used to filter objects in 3D.
Keep in mind that the way we define objects in images, the holes aren't subtracted!
For other measurements see Measuring objects.
The area is the main tool for measuring the importance of objects in Pixcavator. Download the free Pixcavator Student Edition here.
Digital discoveries
- Casinos Not On Gamstop
- Non Gamstop Casinos
- Casino Not On Gamstop
- Casino Not On Gamstop
- Non Gamstop Casinos UK
- Casino Sites Not On Gamstop
- Siti Non Aams
- Casino Online Non Aams
- Non Gamstop Casinos UK
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- UK Casinos Not On Gamstop
- UK Casino Not On Gamstop
- Non Gamstop Casino UK
- Non Gamstop Casinos
- Non Gamstop Casino Sites UK
- Best Non Gamstop Casinos
- Casino Sites Not On Gamstop
- Casino En Ligne Fiable
- UK Online Casinos Not On Gamstop
- Online Betting Sites UK
- Meilleur Site Casino En Ligne
- Migliori Casino Non Aams
- Best Non Gamstop Casino
- Crypto Casinos
- Casino En Ligne Belgique Liste
- Meilleur Site Casino En Ligne Belgique
- Bookmaker Non Aams
- カジノ ライブ
- онлайн казино с хорошей отдачей
- スマホ カジノ 稼ぐ
- ブック メーカー オッズ
- Top 3 Nhà Cái Uy Tín Nhất
- Trang Web Cá độ Bóng đá Của Việt Nam
- Casino En Ligne Avis
- Casino En Ligne France
- Casino En Ligne
- 꽁머니 토토
- Casino Online Non Aams
- Migliori Casino Non AAMS
- Meilleur Casino En Ligne
- Casino En Ligne France Légal
- Casino En Ligne France Légal
- Casinos En Ligne
- Mejores Casinos Online
